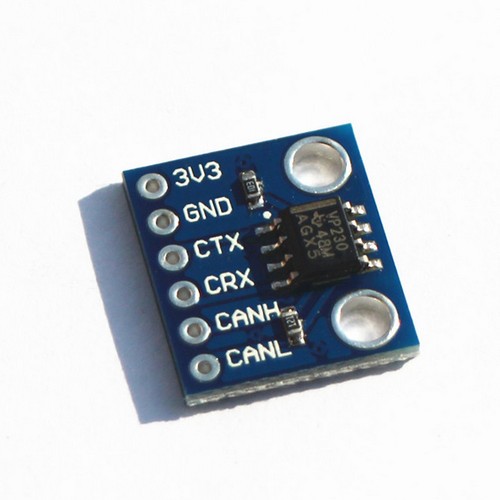
Інтерфейс CAN (Controller Area Network) - це промисловий послідовний протокол обміну даними, що спочатку розроблений для автомобільної електроніки, але широко використовується і в промисловості, медицині, енергетиці. Його основне завдання — забезпечити надійний, стійкий до перешкод і швидкий зв'язок між декількома електронними пристроями (контролерами) без використання центрального комп'ютера. CAN працює за принципом "загальної шини", де всі вузли підключені до двох сигнальних ліній (CAN_H і CAN_L) і обмінюються повідомленнями з перевіркою цілісності даних (CRC), при цьому використовується механізм пріоритету повідомлень та автоматичного відправлення при помилці.
Мікросхеми для реалізації CAN можуть включати контролери CAN (наприклад, Microchip MCP2515 - зовнішній SPI-контролер) і CAN-трансівери (наприклад, Texas Instruments SN65HVD230 або NXP TJA1050), які перетворюють цифрові сигнали мікроконтролера на диференціальні сигнали для лінії. Сучасні мікроконтролери (STM32, PIC, Atmega з CAN) часто мають вбудований CAN-контролер, вимагаючи лише зовнішнього трансівера для підключення до шини. Ці мікросхеми забезпечують високу швидкість передачі (до 1 Мбіт/с для класичного CAN та вище для CAN FD) та високу стійкість до електромагнітних перешкод, що особливо важливо у транспортних та промислових системах.